助教, 2022年4月 ~
国立情報学研究所
総合研究大学院大学
客員助教, 2022年4月 ~ 2023年3月
奈良先端科学技術大学院大学
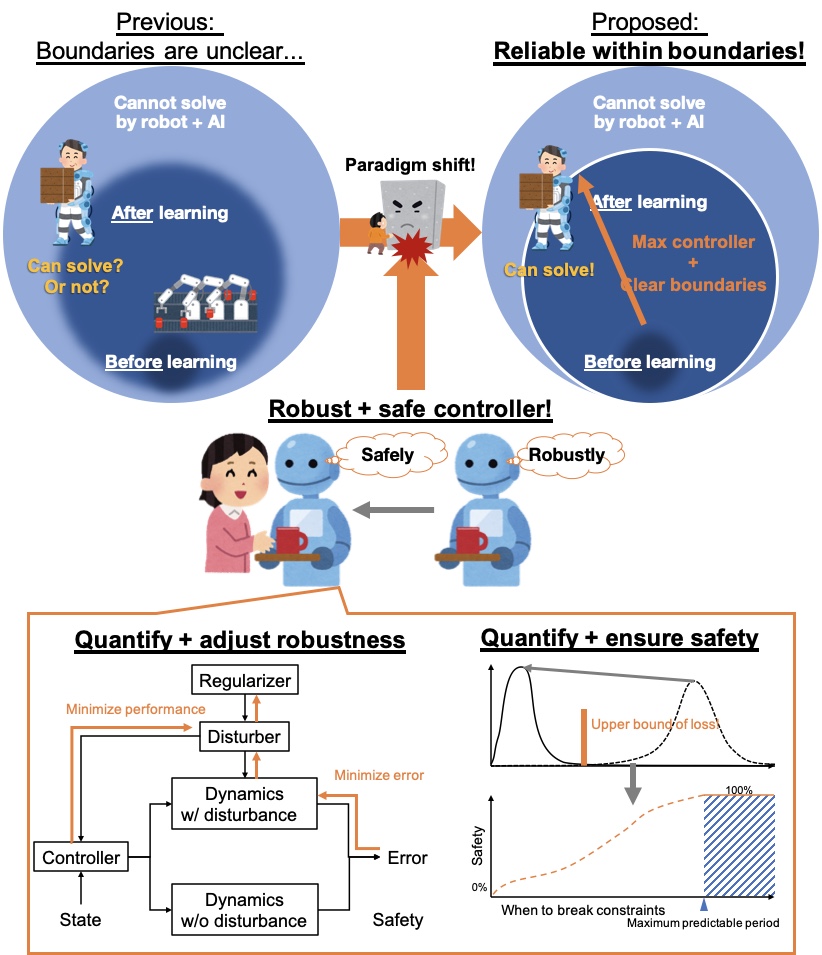
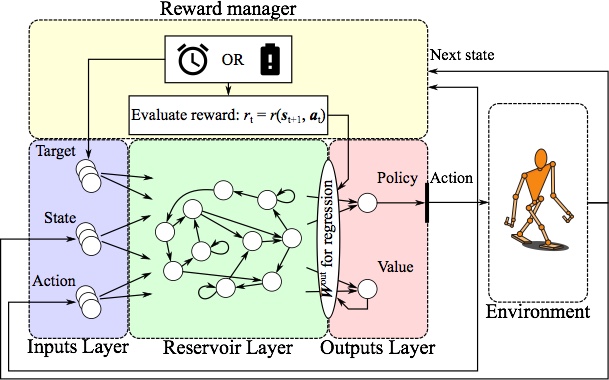
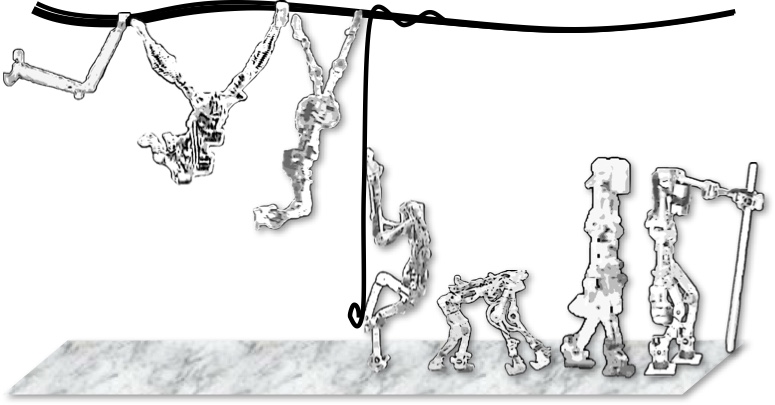
ロボットが自律的に複数の目的を持ち,その中から何を達成したいか選択し,実際に選択された目的を達成するような運動を発現する,次世代の自律ロボットを最終目標としています.
Selected papers
研究業績一覧へ
Scheduled lectures
教育実績一覧へ
新着一覧へ
続きを読む