Selection Algorithm for Locomotion Based on the Evaluation of Falling Risk
概要
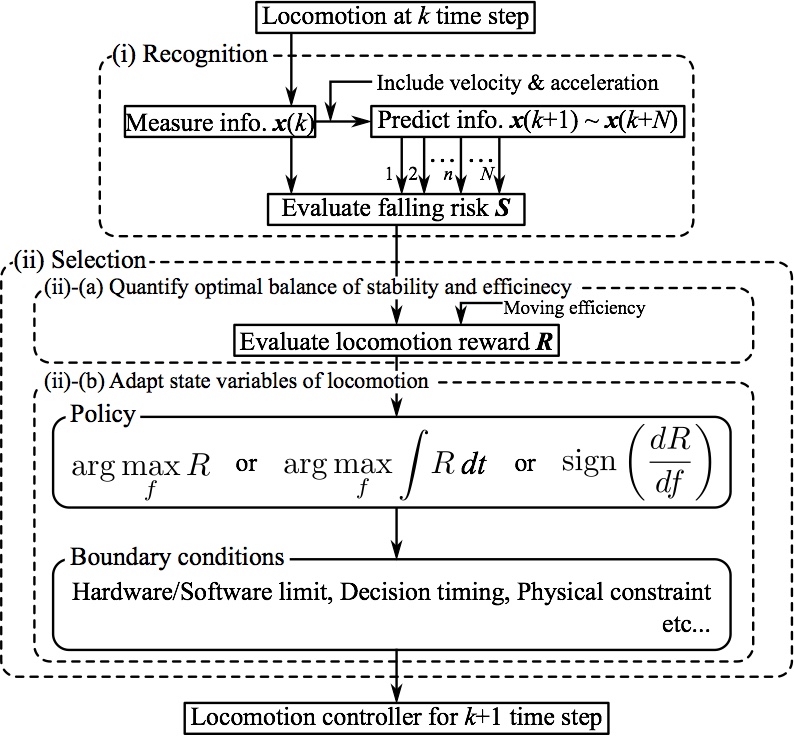
2足歩行や4足歩行といった様々な運動(ロコモーション)は各々が異なる特性を有しているため,移動する環境あるいはロボット自身の状態に対して得手不得手がある. それにもかかわらず,従来の脚式移動ロボットは単一のロコモーションに特化していたため,あらゆる環境へと適応する能力を有していなかった. 全体的な移動性能を向上させる戦略として,我々はSelection Algorithm for Locomotion (SAL)を提案する. SALは内部状態及び外部環境の計測情報からベイジアンネットワークを介してロボットの転倒リスクを評価する. この転倒リスクと各ロコモーションの基本性能といえる移動効率に基づいて設計した評価関数,運動報酬を最大化することを目的として最適選択を図る. 本論文では,歩容(Ga-SAL)と移動速度(Sp-SAL)についてSALを使用することで,ロボットは複雑な環境での効率的な移動性能を獲得した.