Unified bipedal gait for autonomous transition between walking and running in pursuit of energy minimization
概要
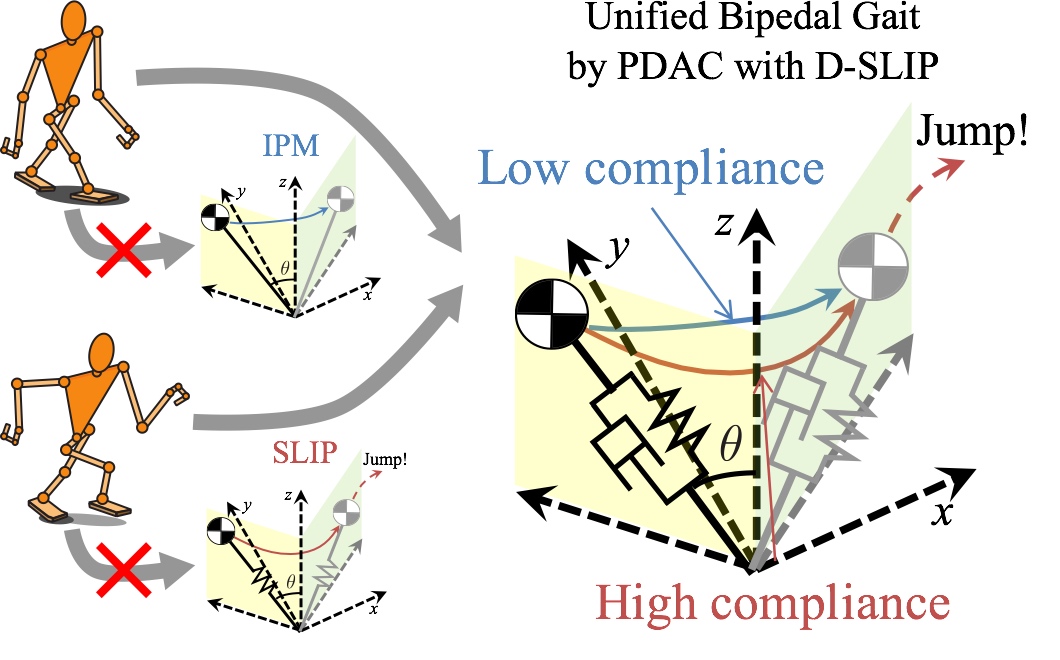
人間を含めて脚式移動をする生物の多くは,低速移動時には歩行を,高速移動時には走行を自然と切り替えることでエネルギー効率の最大化を図っている. ここから,我々は人間を含む生物が歩行と走行という振る舞いの大きく異なるロコモーションであっても共通の制御器によって発現していると仮定した. しかし,従来のヒューマノイドロボットは2足歩行・走行を独立した制御器により実現させていたことに起因し,両者間を遷移するには安定性を確保できるように遷移動作を新たに設計する必要があった. そこで,本論文ではヒューマノイドロボットの2足歩行・走行(ひいては両者間の遷移動作)を統一的に制御する手法,Unified bipedal gaitを提案する. 統一制御器として,我々はPassive Dynamic Autonomous Control (PDAC)が有する仮想ホロノミック拘束に注目した. すなわち,歩行・走行を共通して表現できるモデルである,バネ・マス・ダンパ系のダイナミクスを規範として仮想ホロノミック拘束を設計した. こうすることで,仮想ホロノミック拘束が有する内部パラメータの減衰比を調整することによって,歩行・走行の一方を発現させることが可能となる. 減衰比を移動速度の関数としてエネルギー効率を最大化するように設計することで,ロボットはエネルギー効率を最大化するタイミングで歩行・走行間を自然に安定状態を維持しながら遷移する能力を獲得した.