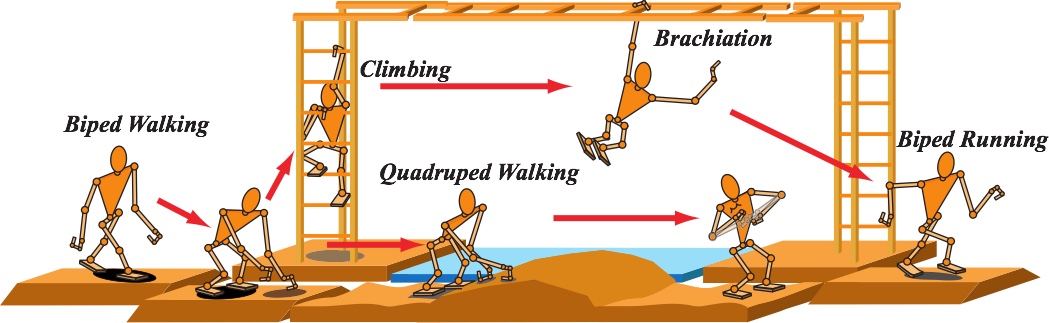
マルチロコモーションロボットというのは,ロボットが単一の移動形態,例えば2足歩行,だけを利用して環境に適応しようとするのではなく,複数の移動形態から最適なものを直面している状況に応じて適宜選択・切り替えていくことでより複雑な環境に適応する,というコンセプトを持ったロボットを指します. このコンセプトは生物に倣っていて,人を例に見れば,普段は歩きますが急ぐ時は走りますし,梯子を登ったり,山道では両手にトレッキングポールという杖を持って脚への負担の分散,つまり4足歩行をするはずです.この複数の移動形態というのは,それぞれが得意な環境・苦手な環境がありますので,互いの短所を補い合い長所だけを上手く利用すれば,単一の移動形態だけを駆使するよりも遥かに優れた環境適応能力を得られます.
そんな複数の移動形態を扱うためには,大きく分けると2つの研究課題があります. まず,ロボットは直面している状況を判断して適切な移動形態は何なのかを選択する能力が要求されます. そして,選択した移動形態へとシームレスに遷移できるような制御器を用いなければ,遷移は不連続に行わざるを得なくなってしまいます. これらの研究課題についてそれぞれ,
を提案しています.