Unified bipedal gait for autonomous transition between walking and running in pursuit of energy minimization
Abstract
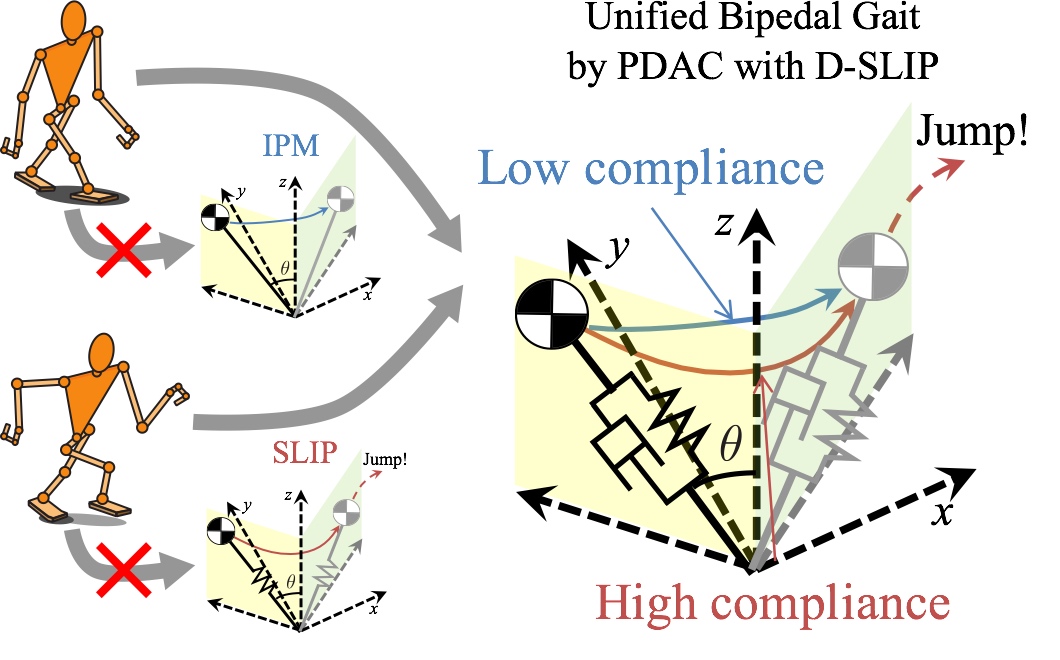
Conventional humanoids have achieved walking and running by independent controllers, even though a transition between these independent motions should be added to connect them while ensuring stability. In contrast, human selects walking/running at low/high speed in terms of energy efficiency, and transits between them naturally. This fact implies that human gait shares the inherent controller among walking and running despite their quite different appearances. Hence, we propose a “unified bipedal gait,” which includes walking, running, and the transition. The unified bipedal gait has the inherent controller: passive dynamic autonomous control (PDAC) with a damping and spring loaded inverted pendulum (D-SLIP) model. The PDAC constrains the humanoid natural dynamics by a virtual holonomic constraint (VHC) that degenerates the natural manifold of the states for stabilization. Compliance in the D-SLIP is capable to yield the required characteristics of walking/running: low/high compliant legs for walking/running. Thus, a novel VHC is designed to extract the required characteristics of walking/running from the D-SLIP dynamics and form the proper manifold. As a result, we achieved the unified bipedal gait that bifurcates to walking and running via the natural transition. The high energy efficiency was confirmed in this unified bipedal gait at any gait speed.