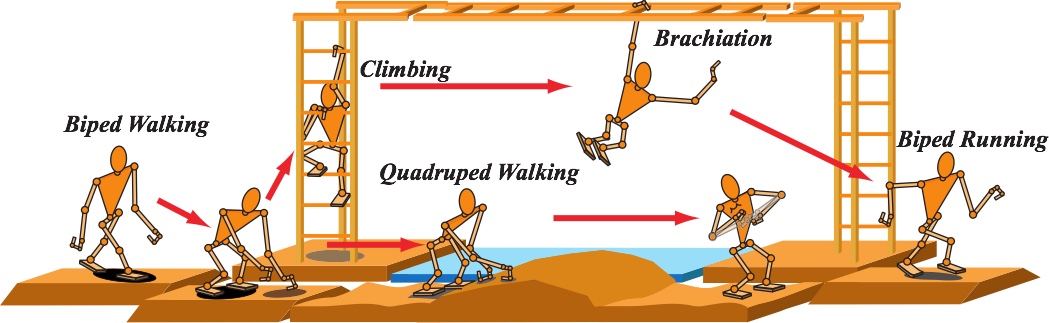
Multi-locomotion robot is a concept to adapt a robot to faced situations, such as on flat and vast terrain, on narrow and rough terrain, on trees, etc., by using many types of locomotion like bipedal walking, quadrupedal walking, brachiation, and so on. This concept is inspired from animals: if you focus on people as an example, usually they walk, but run when they hurry, climb the ladder, use trekking poles on mountain path to reduce the burden on the legs (it is regarded as quadrupedal walking). As respective types of locomotion have good/weak situations, exploiting their advantages only (in other words, complementing their disadvantages) yields much better environmental adaptability rather than using only single locomotion.
To succeed this concept of multi-locomotion robot, two major research issues are raised. First of all, the robot is required to judge what kind of situation it is facing and to select the optimal locomotion for it. And if the robot does not use a unified controller that can seamlessly transition to the selected locomotion, the transition will have to be done discontinuously with great loss. To solve these two issues, we proposed the following methods.