Research
プロジェクト
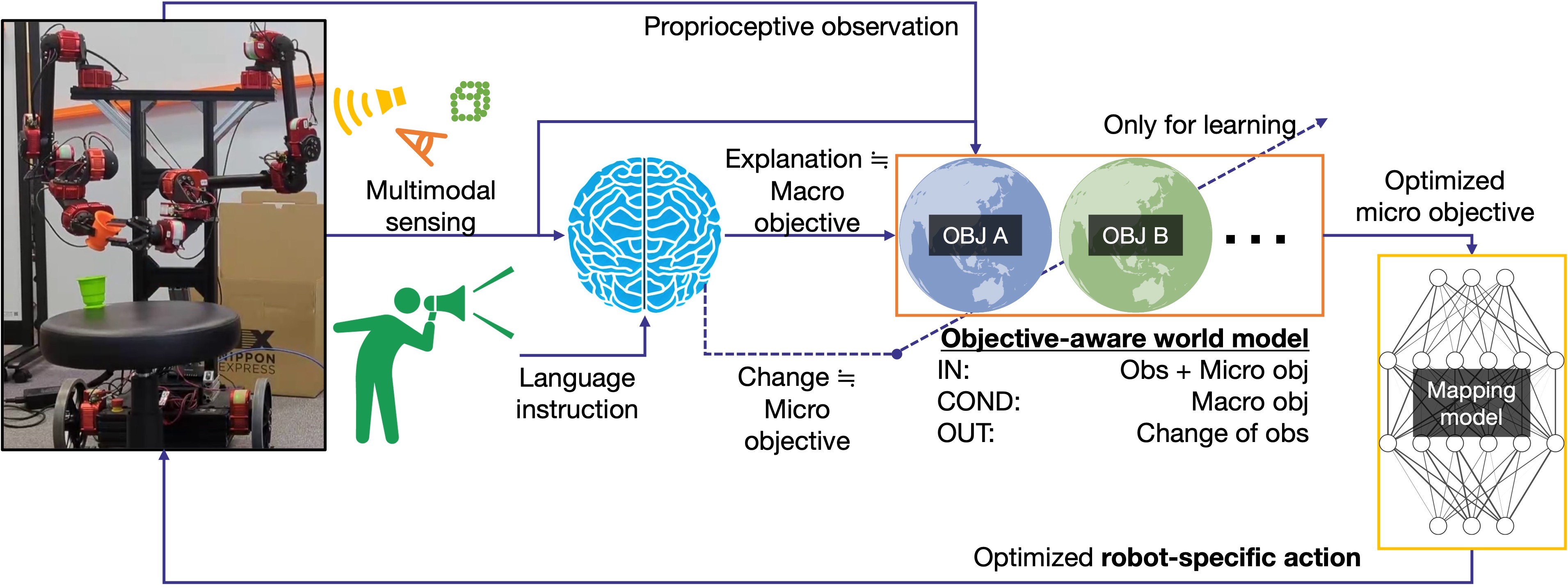
インクルーシブロボット基盤モデル(JST CRONOS)
言語指示に応じてロボット独自の行動を最適化可能な基盤モデルと接続された世界モデルを開発しています.
- ロボット間で共通する潜在的な行動空間とロボット固有の行動空間の写像
- 言語情報に応じて内部状態表現を切り替える軽量ハイパーネットワーク
- 多目的最適化として解釈した世界モデルの学習
強化学習
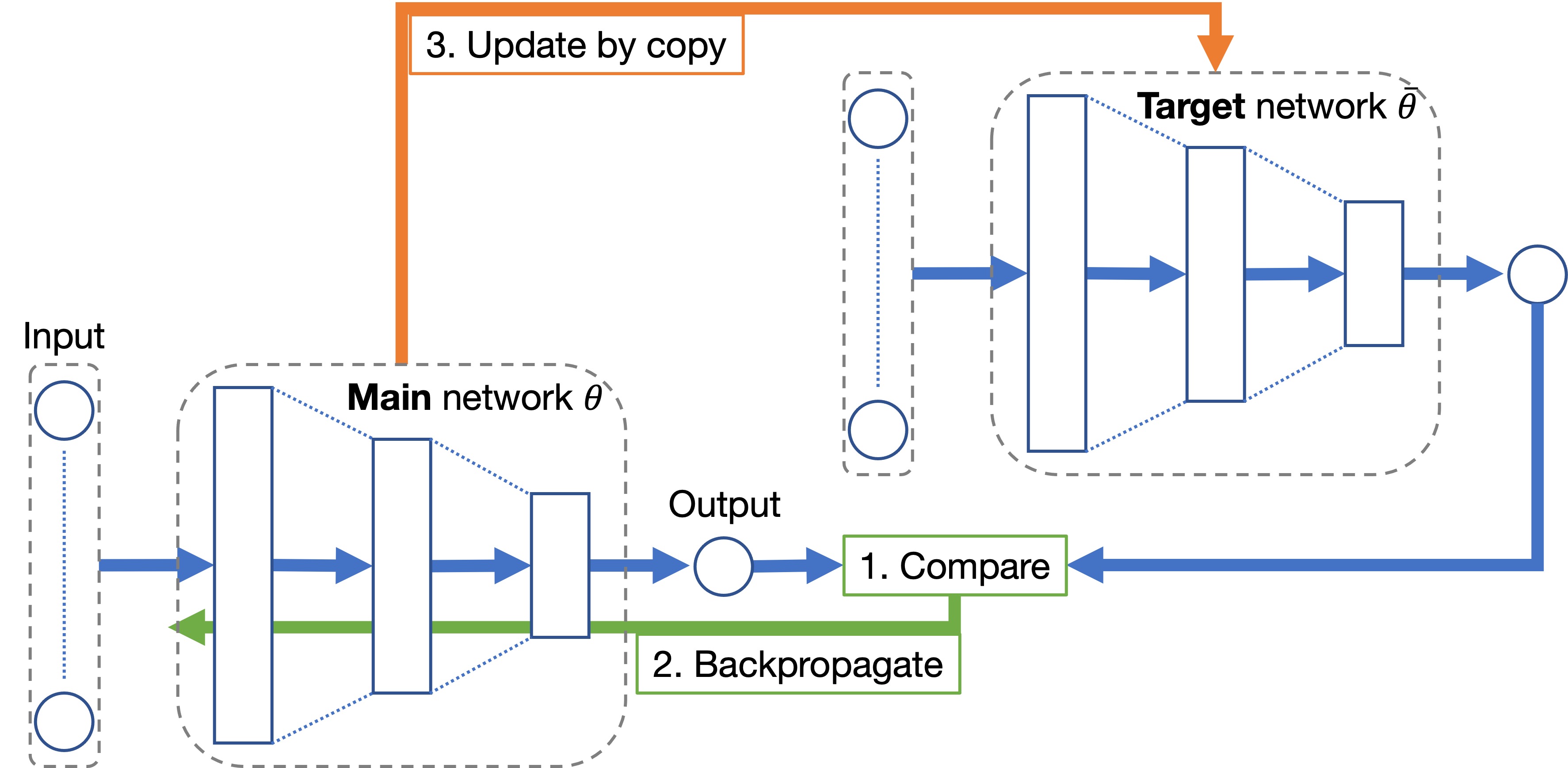
確率推論としての強化学習
強化学習を確率推論問題として解釈することで見出だせる様々な価値を導出・解析しています.
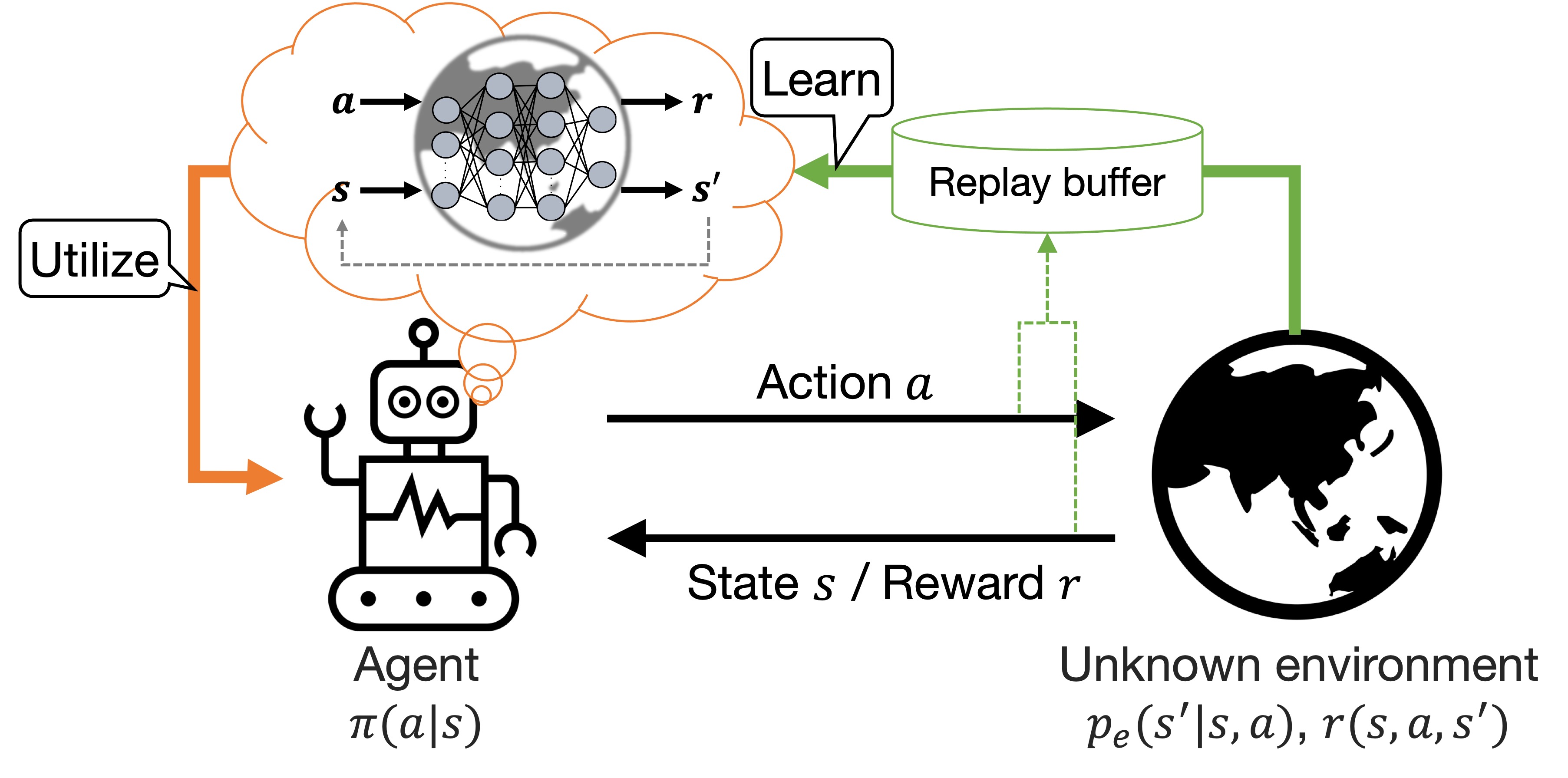
モデルベース強化学習
世界モデルの学習とそれを活用した実時間でのモデル予測制御について研究しています.
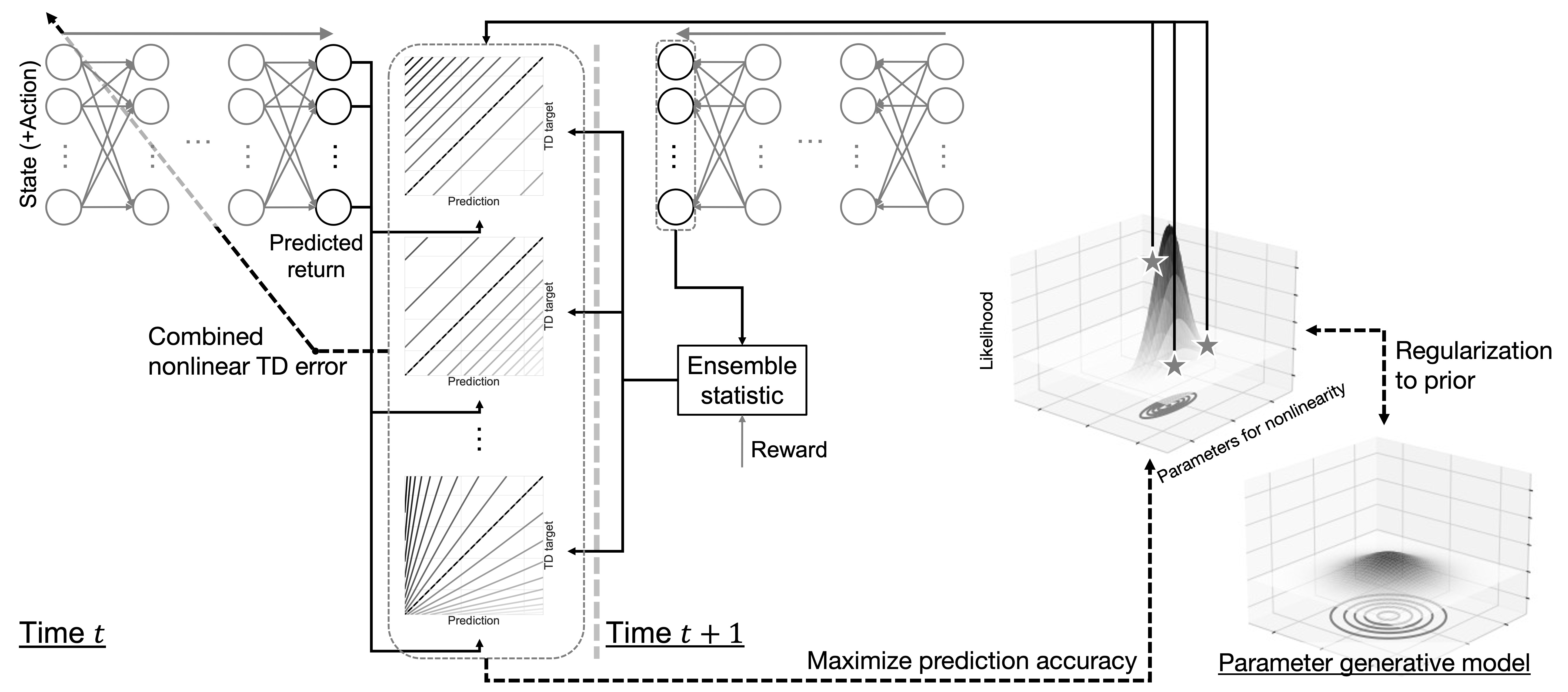
深層強化学習の安定化
深層強化学習が安定して方策を最適化できる安定化技術を開発しています.
模倣学習
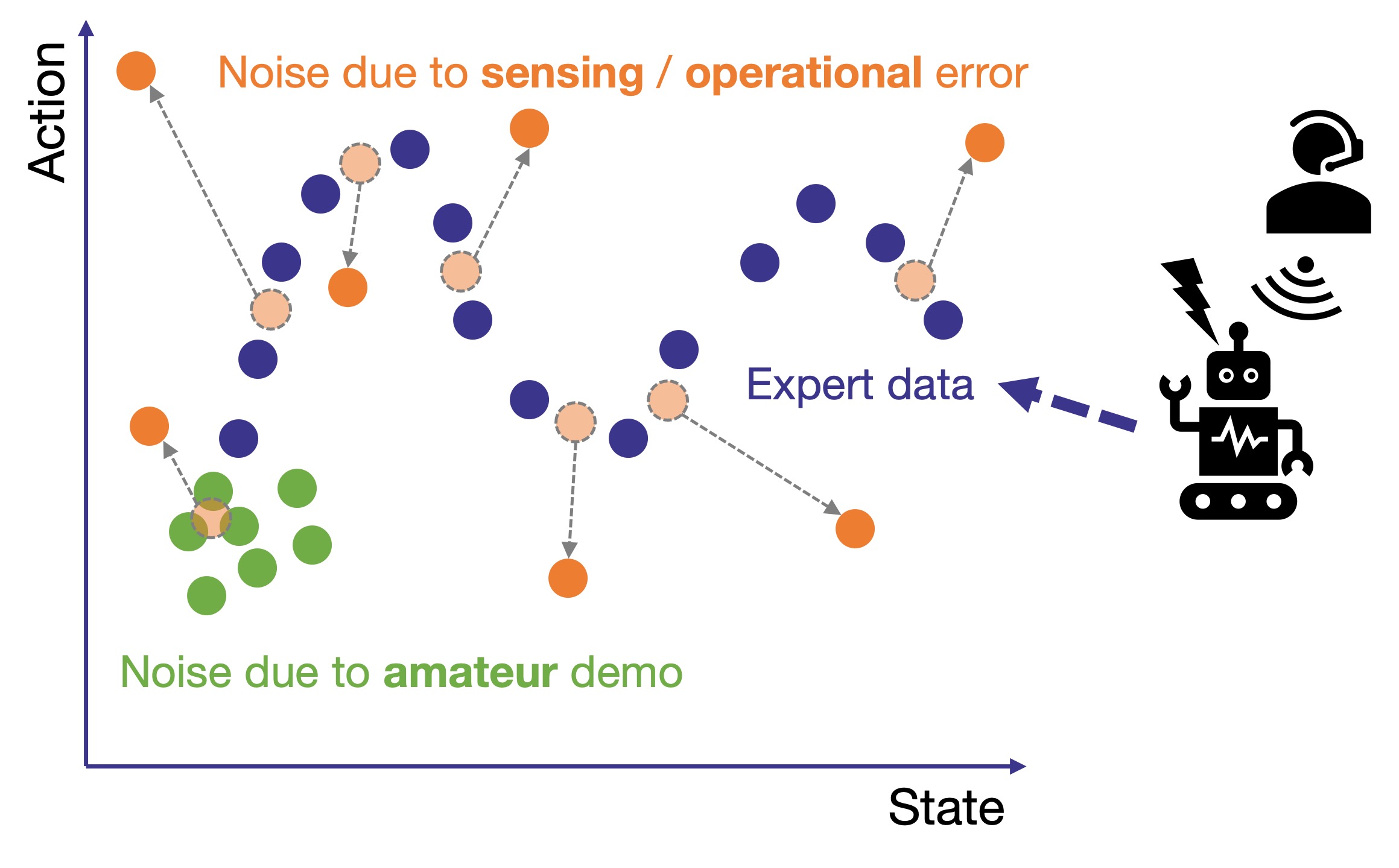
不完全な教示の活用
十分な品質・種類・量の教示データを用意できない中での模倣学習技術を開発しています.
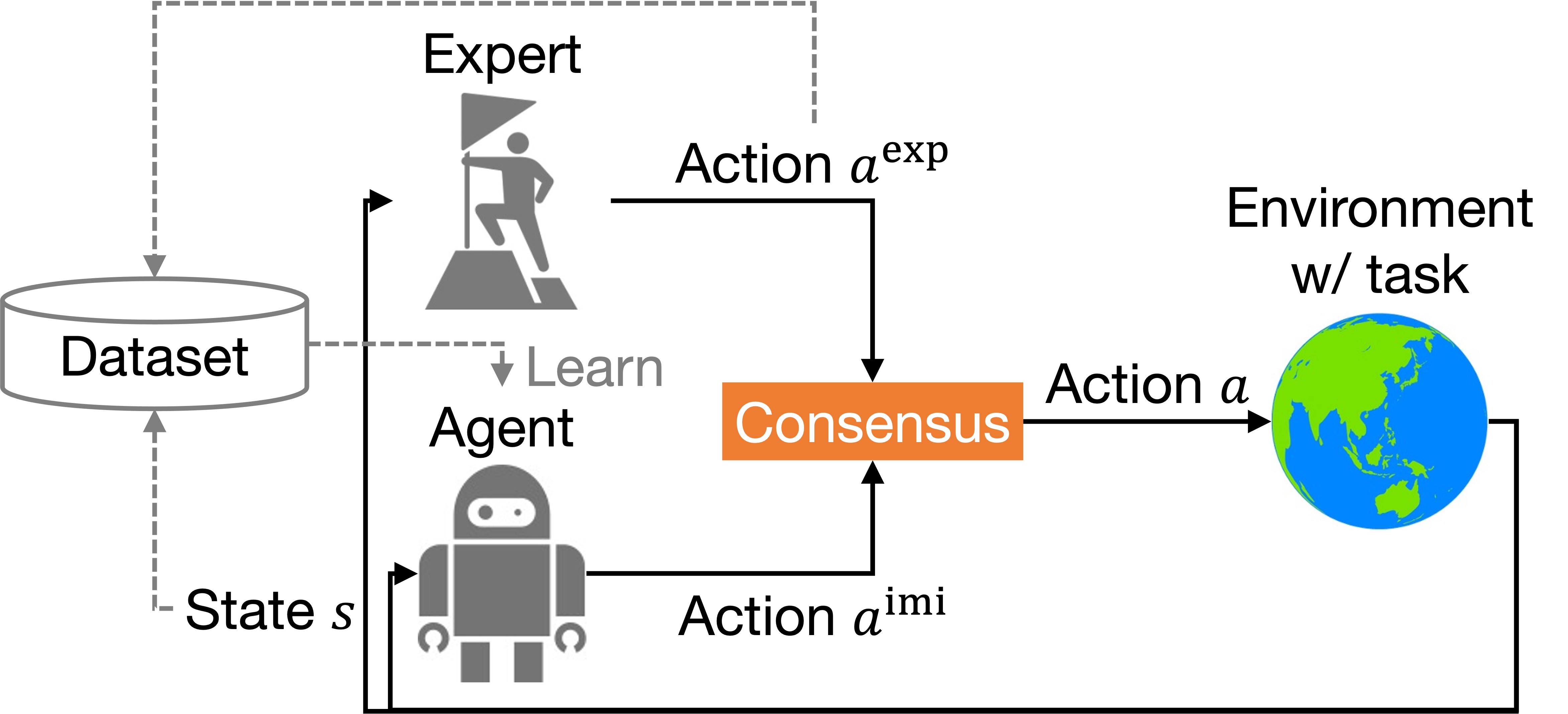
インタラクティブ模倣学習
教示者とエージェントが協働で模倣に用いるデータを収集する枠組みについて研究しています.
- 非定常な複数タスクの継続学習
- 操作主体感を損なわない能動探索
- 信頼度付き複数行動間での最適な合意形成
その他の機械学習
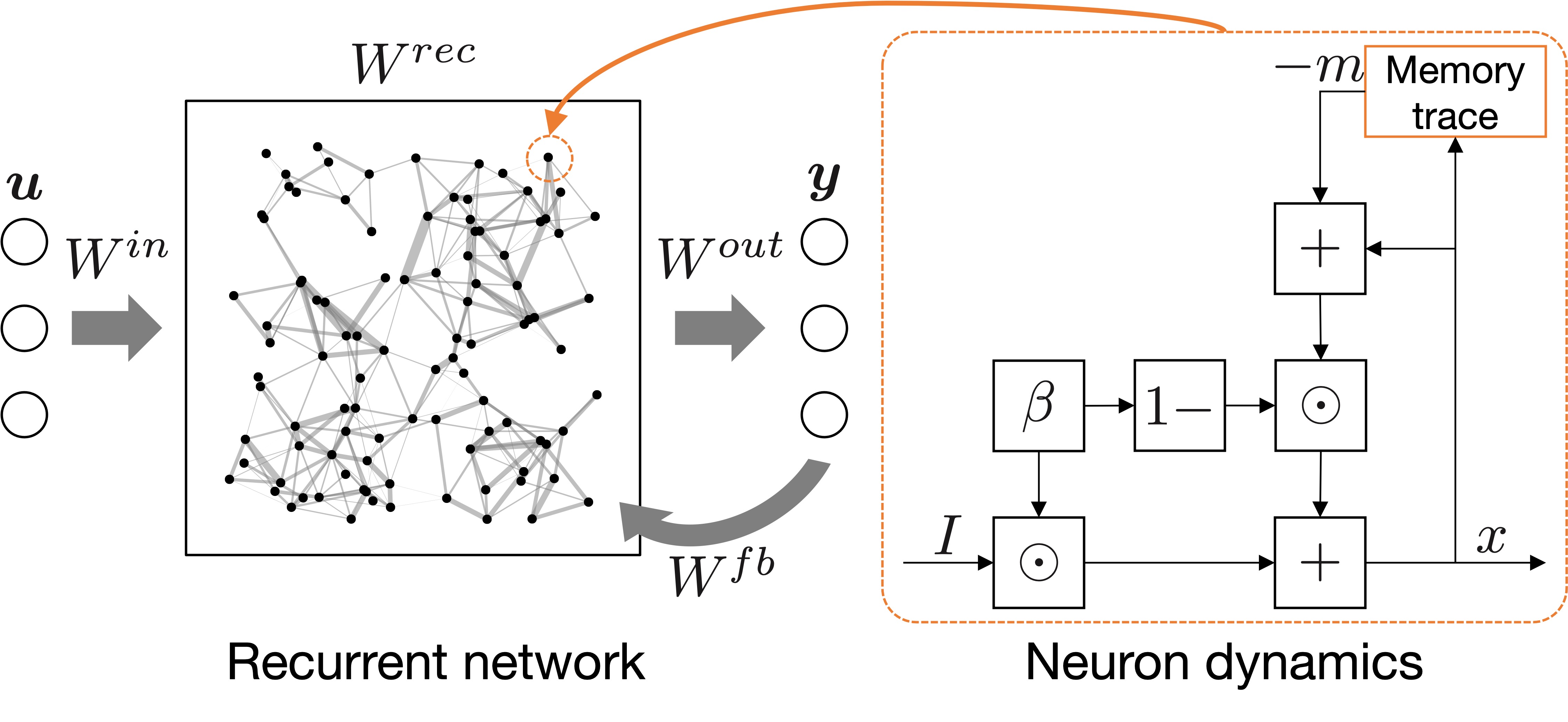
時系列データ処理
ロボットや人の運動を解析・表現するために重要な時系列データを処理するモデルを設計しています.
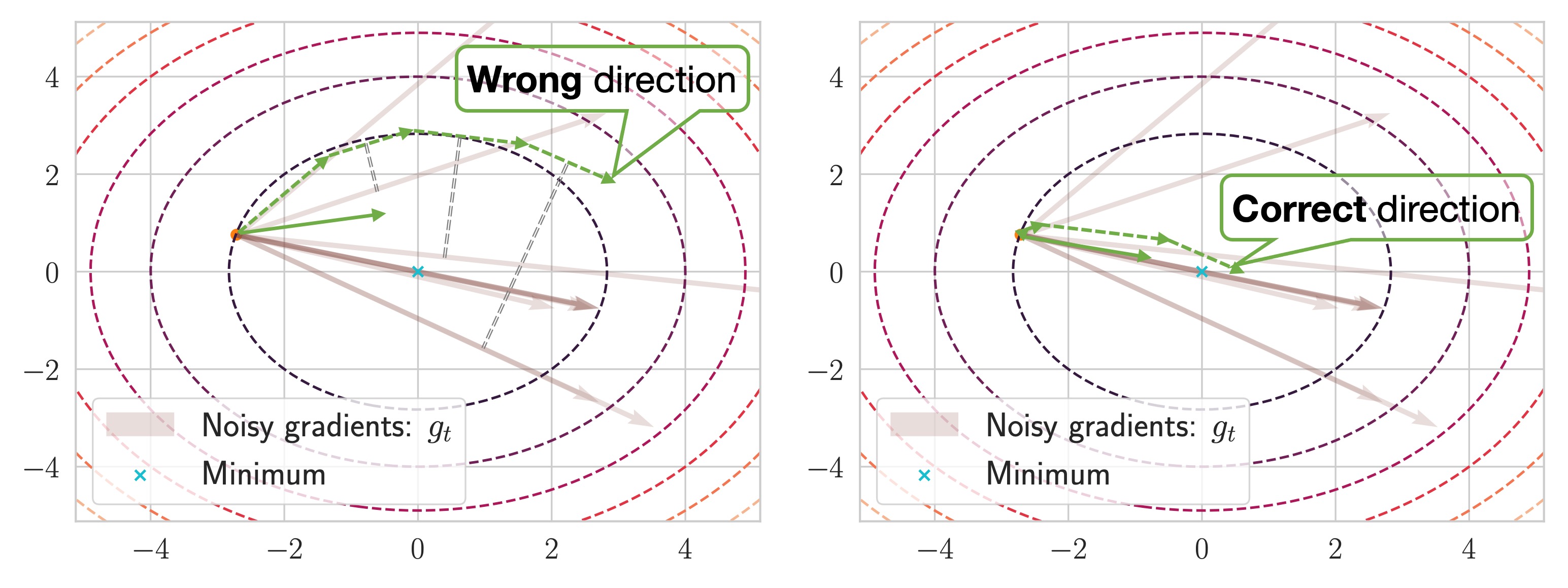
確率的勾配降下法
深層学習のコア技術である確率的勾配降下法の性能向上を進めています.
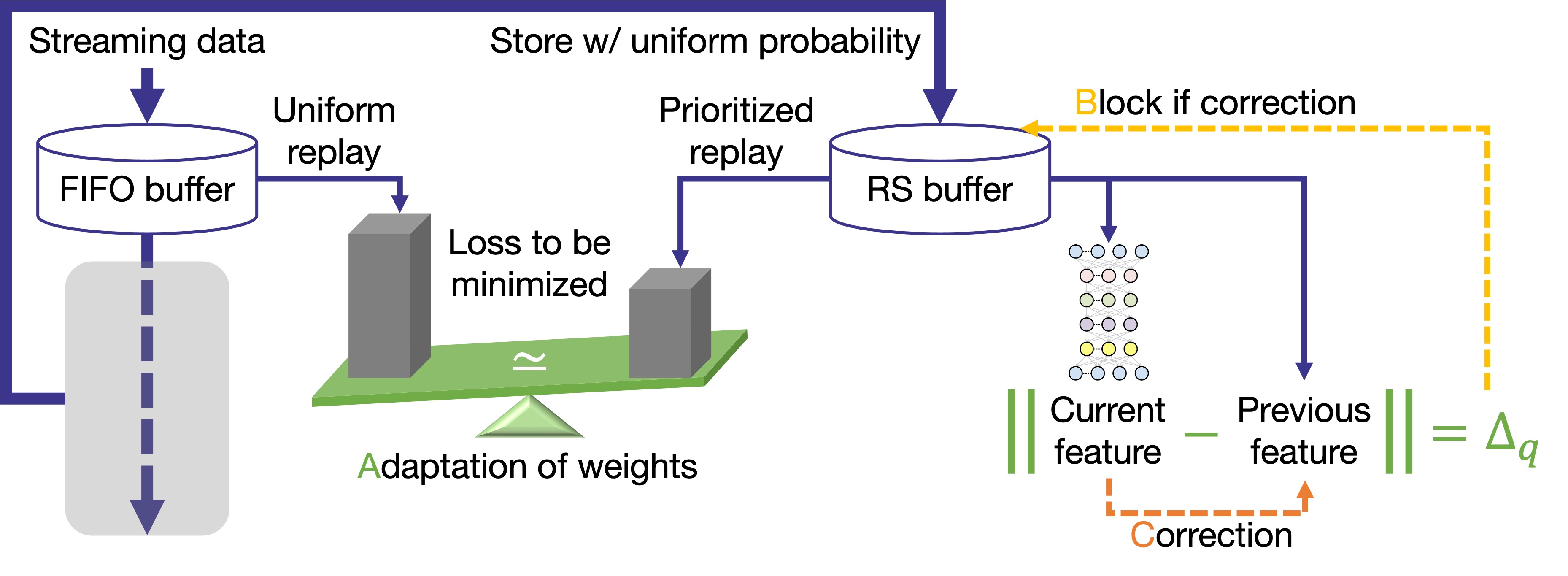
生涯(継続)学習
自律ロボットが継続的に学習し続けるための基盤技術を開発しています.
ドメイン志向
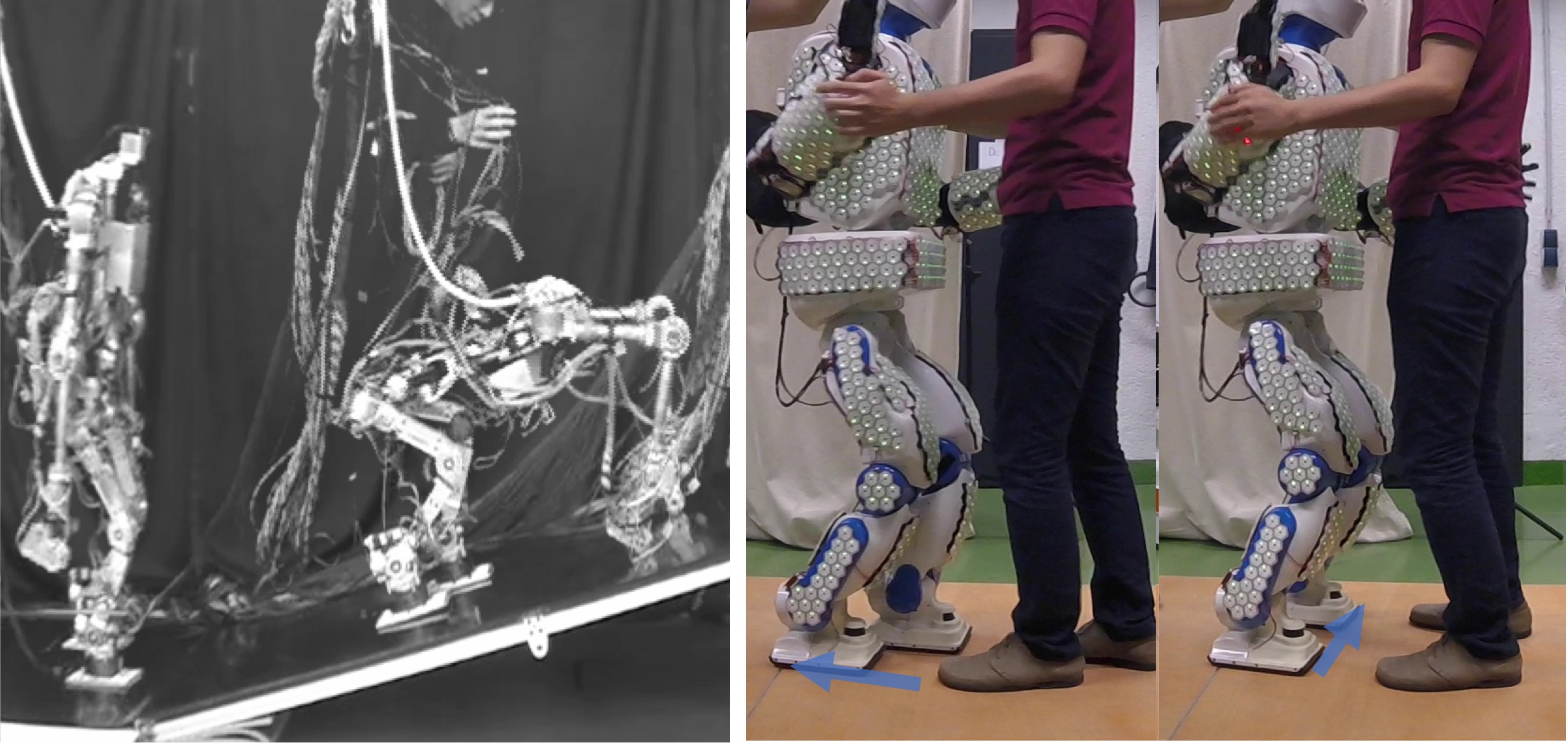
ヒューマノイドロボット
汎用型ロボットとして人社会での活躍が期待されるヒューマノイドロボットの運動制御について研究しています.
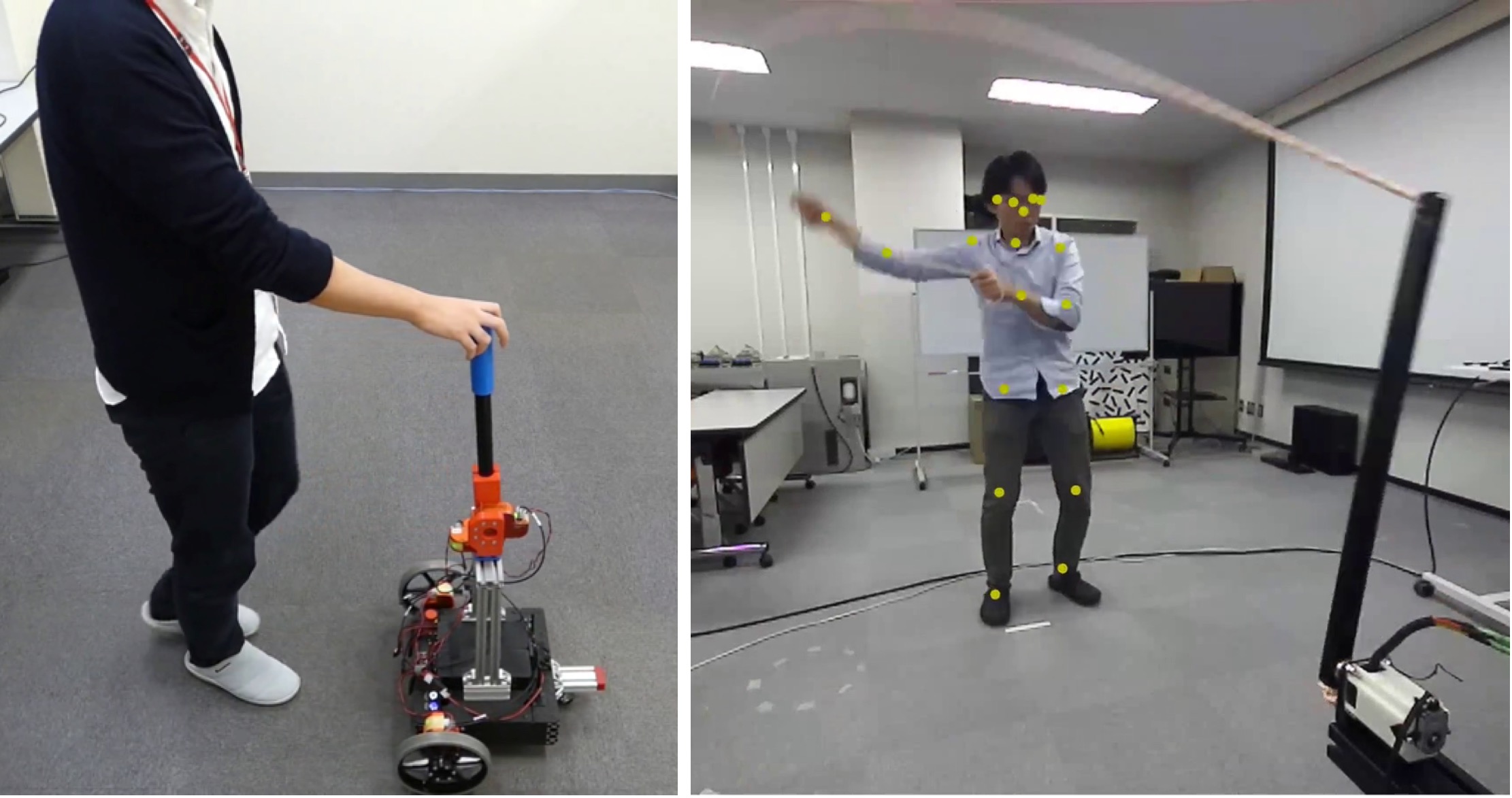
人支援ロボット
様々な人を支援するためのAI技術を開発しています.